Today, I am re-posting a blog post that ran last year during my expedition to the Galapagos Islands. In order to help you to appreciate and understand some of the tech that makes our expedition possible, I’ve written a post about Hercules and its parts.
*****
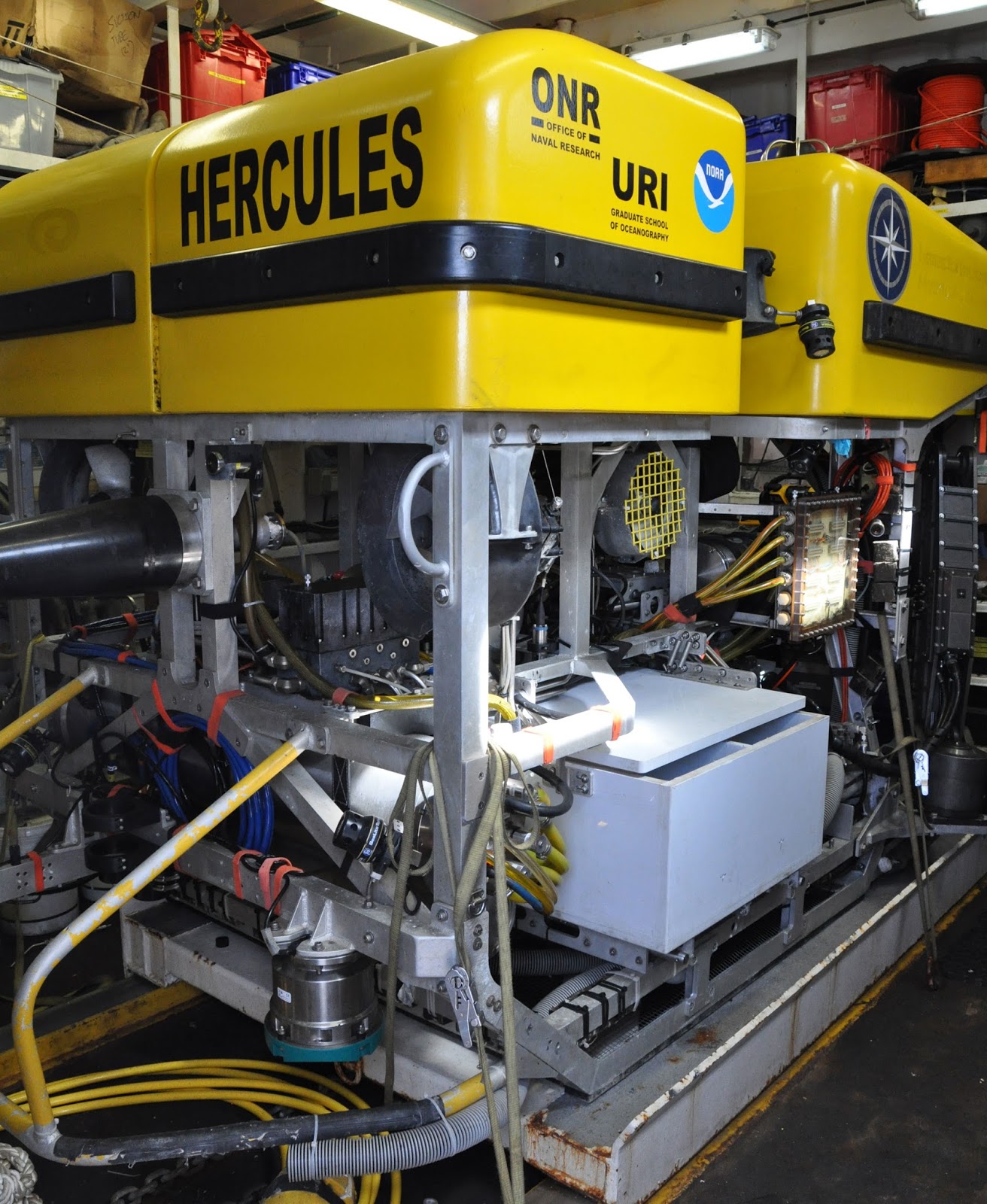
In case you have been wondering about some of the technology that makes ocean exploration aboard the E/V Nautilus possible, today’s post is about Hercules, one of the ROVs.
 |
| Hercules parked inside his hangar, where he can be worked on and protected from the elements during transit. |
Todd Gregory designed and built Hercules. He gave me a tour of Hercules when I was aboard the E/V Nautilus last year. A little background info as we begin:
Hercules was built in 2002, was tested and finished in 2003, and his first mission took place in summer 2003 on the R/V Knorr. He can dive up to 4000 meters (13,124 ft) deep. He is 2.3 meters (7.5 ft) high by 1.8 meters (6 ft) wide by 3.4 meters (11 ft) long. He weighs 5500 pounds (or more, depending on the scientific equipment added to him), but because of the foam that has been added to him, he has about 30-50 pounds of positive buoyancy, adjusted each dive based on equipment (with lead blocks).
Hercules can descend and ascend at a rate of 30 meters per minute. His maximum transit speed is 1 meter/second (2 knots), and his maximum on-bottom transit speed is 0.5 meters/second (1 Knot), with no sampling occurring.
Hercules is outfitted with all kinds of interesting technology and equipment. It’s a bewildering array, until Todd explained some of it. This is the high definition camera. It is able to zoom in and out, and it has a series of lenses to correct for the index of refraction of the water. It produces very high-quality images, which is important, as community members and scientists around the world are fascinated by the footage, and it is used as a part of scientific research regularly.

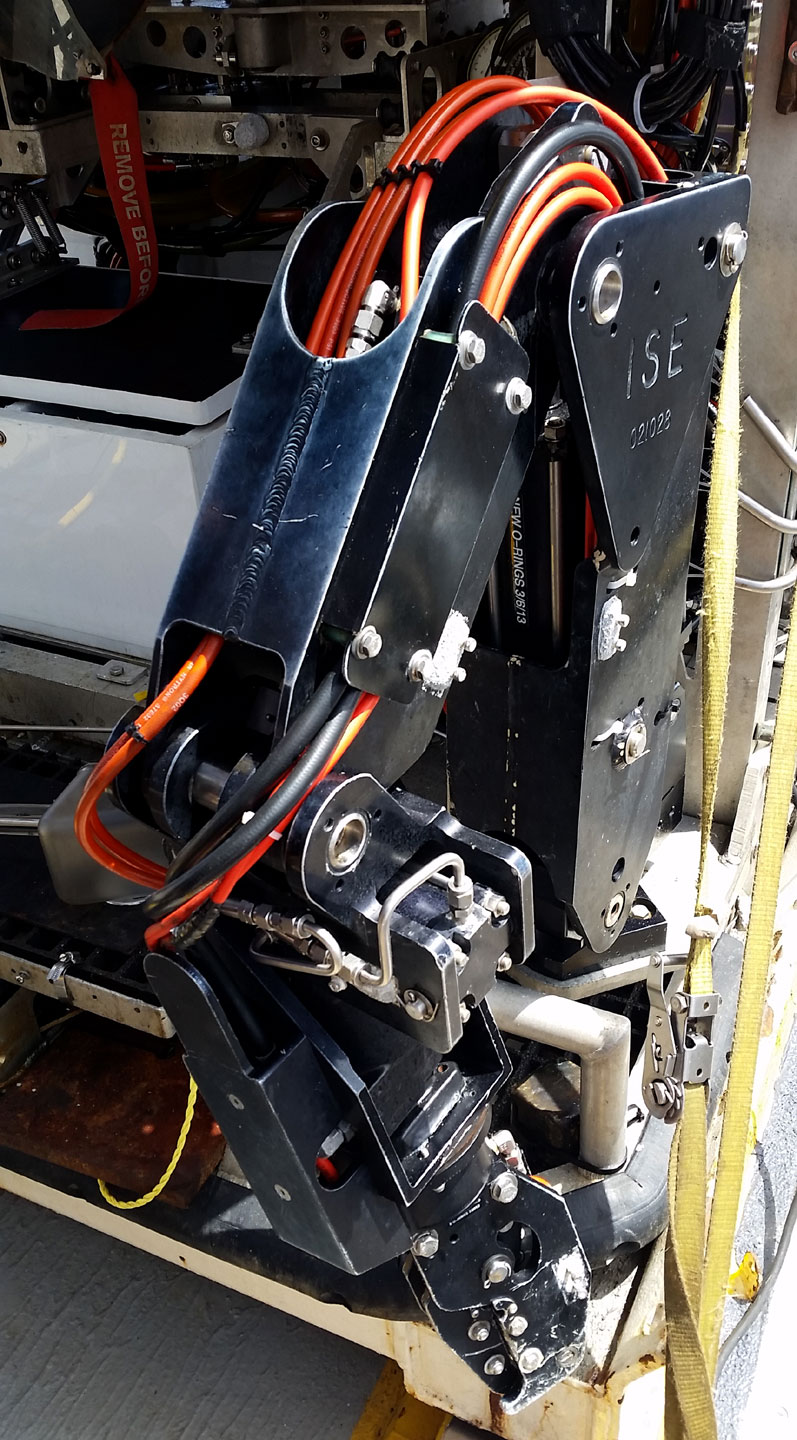
Hercules is able to collect samples and manipulate various scientific equipment using his Predator arm. It is quite a versatile piece of equipment, as it does both heavy lifting and performs delicate maneuvers to manipulate instruments and collect samples. It is controlled by a multijointed joystick in the control van. Some of the actions on the joystick used to give force feedback to the operator, meaning he or she could actually feel resistance when trying to lift or maneuver heavy objects. But a key component for that system broke, and OET opted not to fix it. It’s just as well, reports one of the ROV pilots, because it created power-hogging issues.
This is Mongo, the work horse arm that serves as a backup, and is used for positioning big and heavy equipment so that the Predator arm can interact with it. Being that Mongo is big and clumsy, it is not the preferred arm for collecting samples.

These sample boxes are a recent addition. Once samples have been added, they can be sealed off so that they are kept at nearly the same temperature in which they were collected, even as the ROV ascends through warmer water. This is especially helpful when biological specimens are needed to be kept alive. They are made of a really thick plastic that helps to insulate the water inside, and there is a rubber ring along the top rim that seals in the water once the box has been closed up. As samples are collected and deposited inside the box, scientists and data loggers in the control van make notes as to the type of sample collected and whether it was placed in the left or right hand side box. Samples collected at different locations are not intermingled in the same box, if at all possible. There is another box along Hercules’s right (starboard) flank. The black coating on top of the box was added just recently, as the bright white plastic caused too much light reflection off its top, decreasing the quality of the image produced by the cameras on Herc and Argus.

This is a fiber optic north-seeking gyrocompass. It measures very small differences in the speed of light due to the Earth’s rotation and whether the vehicle is turning with or against that rotation. The reason why a magnetic compass that seeks magnetic north is not used is because if Herc is diving on a shipwreck or another object that has a lot of metal in it, that metal could be magnetized and could throw off the compass. This compass has miles of fiber optic cable in it, and the science behind its function is possible due to Einstein’s theory of relativity (E=mc2). Last year, Todd and even Larry, one of the scientists aboard the ship, could explain the basics to me, but both were quick to admit that they did not know enough about physics to deliver a truly great lesson. (And I have to admit that even if they had, I might not have been able to follow.)

There are 6 thrusters aboard Hercules to help him move. He can move up and down and side to side, but he does not have the ability to pitch or yaw. The top thruster pictured here (black) makes Herc move up and down. The bottom one in the photo (with the yellow grate in front of it) moves the ROV from side to side.
The “brains” of Herc are contained within this titanium tube. The tube alone, just in terms of material and engineering, is worth about $50,000! All of the wires emerging from the brains are contained within the yellow hoses you see here. The wires go out to all of the sensors and cameras and lights throughout the vehicle. But first, they are split into two portions, each of which goes to a junction box on one side or the other of the ROV (next photo).
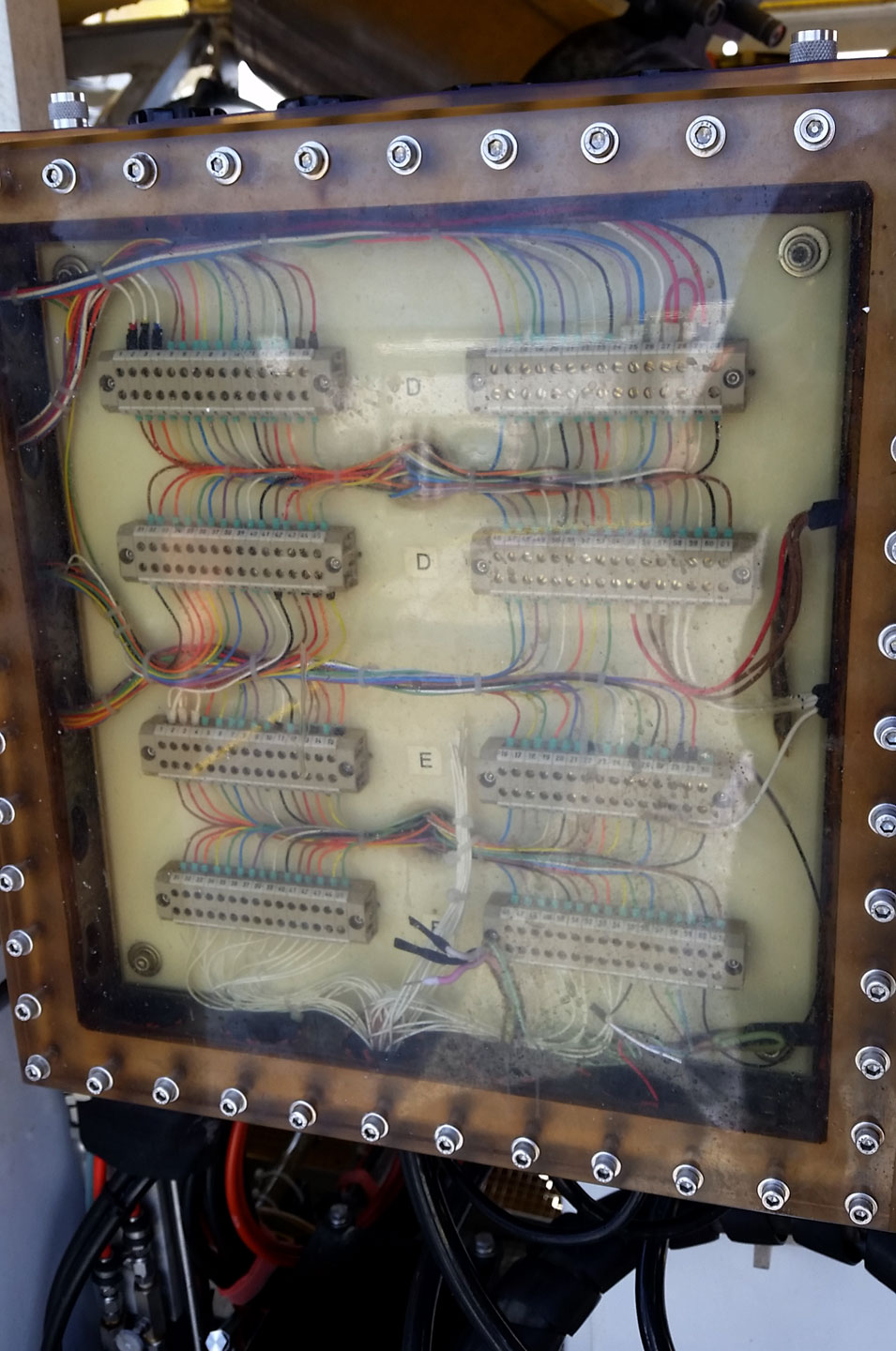
The wires that you saw emerging from the “brains” in the last photo are routed to two different junction boxes, one on each side of the ROV. This photo shows the starboard side junction box, containing half of the wires that have come out from the brain. It is filled with oil (no air bubbles whatsoever), to protect the components from water pressure. The oil compresses very little when Herc is under pressure.
These instruments are a temperature probe, very helpful when you are studying hydrothermal vents, as we were when I took this photo last year, and a scooper for collecting samples. They are held in place with magnets to the “front porch” of the ROV.
This is a “slurp gun”, for sampling from the sea floor. It can be used to collect samples of small organisms, for example, that are too delicate to be handled by Herc’s Predator arm, and has been used in our current expedition to collect sediment samples expected to bear microfossils and bits of shell that could prove that the region we were exploring was once part of an ancient shoreline.
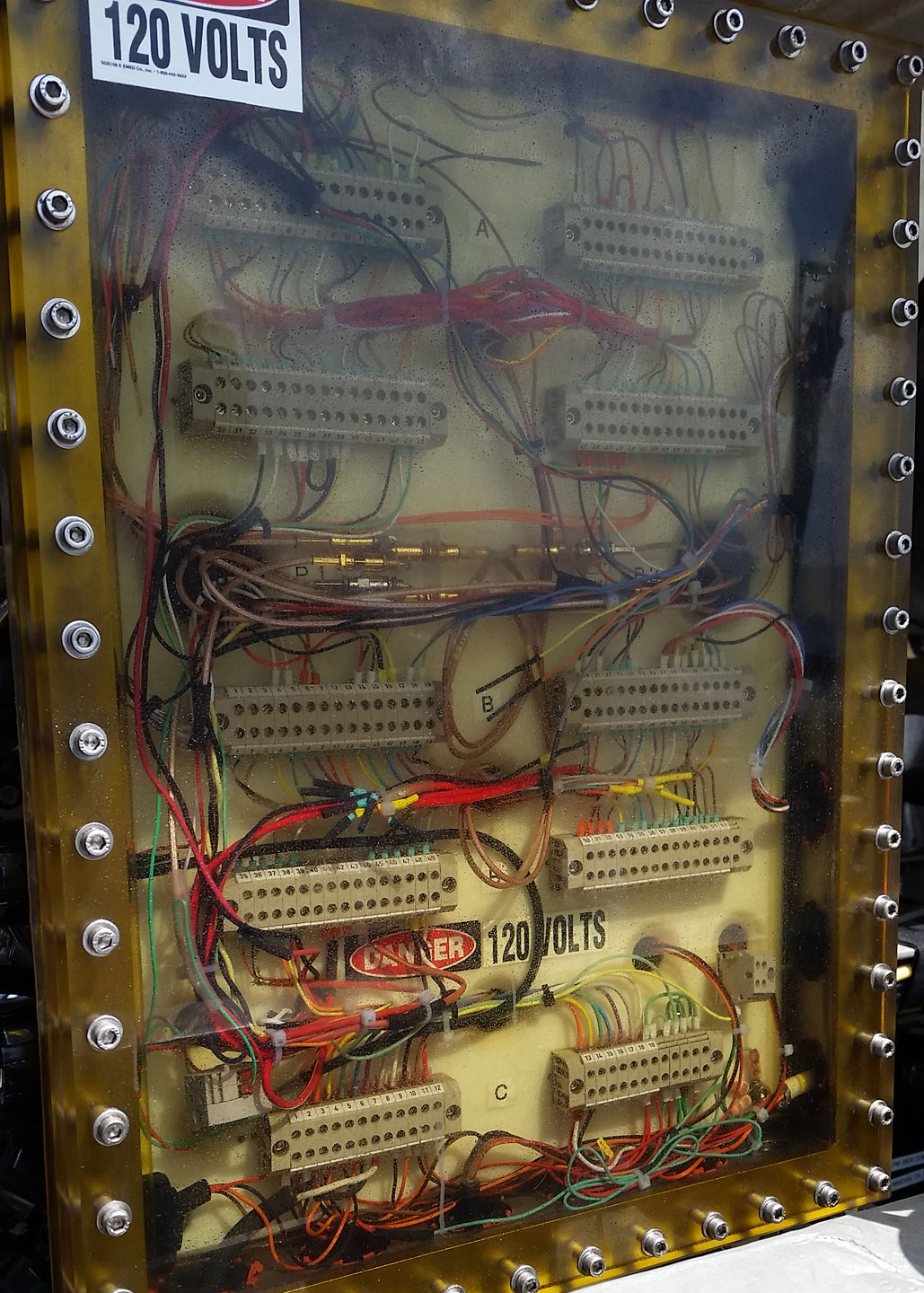
This is the other junction box, the one on the port side of Herc.
These are Niskin bottles for sampling water. Scientists wanting to know more about the environment may want to study the composition of the water itself, for information like the dissolved oxygen content, salinity, and other chemicals in the water. Sometimes, they are used for biological purposes as well: for example for determining the amount of plankton or bacteria in a particular sample of water from a particular place. These are already in their “ready” positions. They can be triggered remotely to close, sealing the water present in the bottle at that time up tight.
This titanium tube contains the brain behind the mapping and camera sensors mounted on the rear of the vehicle (as the team was starting to ramp up to get ready for the dive, our tour was cut a little short, so I do not have pictures of those included in this posting).
The top portion of the vehicle is made up of syntactic foam, which is silica-based, and in its raw form resembles a multitude of bubbles cast in glass. This provides the buoyancy for the vehicle (it weighs about 5500 pounds in air, but is neutrally, or just barely positively buoyant, in water). This gives Herc greater maneuverability in the water, and also provides a mechanism for Herc to ascend to the surface if for some reason his tether were to be broken.
The team is running through the last checks needed before we launch in about 3 hours. Here, members of the Corps of Exploration are wrapping the tether and recovery line together into a “daisy chain” to make recovery of the vehicle easier later.
One last and important addition to Hercules is Tiki. Tiki was bolted to Herc 11 years ago during the Titanic expedition on the NOAA ship Ron Brown. They were having issues with the ROV, and Bruce Cowden, the ship’s bosun, carved Tiki out of a piece of driftwood and told the ROV team to mount it on the robot to help dispel the bad energy that was plaguing the little vehicle. It worked, and Tiki has been attached ever since. Bruce insisted that Tiki be anointed in oil before each dive, a practice that continues to this day.
The above is part of a multi-part series to run over the next week and a half. Melissa Baffa, Vice President of Program and Volunteer Services for GSCCC, is part of the Corps of Exploration again this year, exploring the deep sea aboard the E/V Nautilus. This blog series chronicles her dive into the Unknown.
¸.·´¯`·.¸.·´¯`·…¸> `·.¸¸.·´¯`·.¸.·´¯`·…¸> `·.¸¸.·´¯`·.¸.·´¯`·…¸>